Robots went to work in the automotive industry in the 1960s and quickly found a home in paint shops. They're ideal workers in an environment where materials and processes create potential hazards for humans. But teaching robots how to paint vehicles has always been a lengthy and laborious task. A human engineer must determine the paths the automated workers should follow, then train the robots. As Tim O'Neill, an engineer at GM's Detroit/Hamtramck Assembly Center Paint Shop, says, "With a new car body, I lock myself in a room with the robot for a few weeks and teach it the path manually, point by point."
But help is now at hand. Several years ago, GM R&D researchers
Elio Eusebi,
Harry Kuo,
and Yilong Chen conceived the idea of generating robotic paint
paths off-line using computer simulation. Although this trio
brought together expertise in both paint processing and robotic
controls, they needed additional input from the people actually
doing the painting. With the cooperation of Detroit/Hamtramck
as the production target, the team got to work developing
robotic paint paths rapidly and, at the same time, improving
overall finish quality.
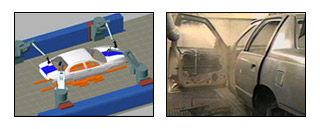
The end result is GM-RAPID, a technology that lets engineers program robots in a computer simulation workcell to take just enough time and use just enough paint to get the vehicle finish just right. The engineers can also get a head start by developing new paint processes using CAD data before the actual car body ever exists. (As shown in Figure 1.)
"We began by creating a computer model of the paint booth workcell," says Kuo. "That may sound easy, but to maintain quality, we measured dimensions against the blueprints, often down to the millimeter. Once we completed the workcell model, we imported CAD data of the car body into the model. Next, we calibrated and optimized six critical paint-process variables."
Figure 1. Robots on the production line follow the intricate paths outlined using computer simulation.
Optimizing these variables is one area where GM-RAPID outperforms any other system. Conventional methods limit optimization to paint fluid delivery rate, fan air pressure, and atomization air pressure. GM-RAPID includes three additional variables-paint spray gun distance, gun speed, and spray overlap-insuring high quality with a minimum of paint.
"The parameters change depending on the paint color you're using," says O'Neill. "For example, painting a car white requires only 400 cc of paint per minute due to the percentage of solids in the paint, but painting a car silver requires 750 cc per minute. Flow rate is a big concern, because it changes dramatically from color to color."
After optimizing the parameters, the engineers generate robotic paint paths using simulation software. Then GM-RAPID simulates the entire paint application process. The program models each robot's movements to determine how it will reach all points on the paint path while dodging collisions with fellow robots, the vehicle body, or other equipment in the workcell.
"At any point in the simulation, the software can rapidly accept program modifications," Kuo emphasizes. "Once the simulation is complete, the next step is the critical one: turning the virtual paint path into reality. The program converts the simulation paths to a format specific to each paint robot controller and delivers these as motion control programs to the robots themselves."
Of course, the real test is how well the robots perform. After a dry run in a Robot Teach Booth, where test robots move along the programmed paths without actually painting a vehicle, the engineers take the finished paths to the paint line for validation. The question then becomes how well the simulation compares with reality.
"The first time we used the program in a real-world setting, GM-RAPID performed beyond expectations," says Kuo. "We did a bit of debugging and tweaking, and the plant engineers made a few modifications using manual path teaching methods. But the finished paths were smoothly transferred to the robots in the paint module."
After validating the effectiveness of GM-RAPID, the Detroit/Hamtramck paint shop put the program into production on the 2000 LeSabre in March 1999, followed by the 2000 DeVille several months later. With a goal of achieving a world-class finish on every one of GM's products, this once virtual technology has now become reality.
by Diane Kightlinger